Новая искусственная кожа на основе гидрогеля с возможностью тактильного восприятия
На протяжении десятилетий робототехники пытались создать роботов, которые были бы похожи на человека, как по внешнему виду, так и по своим возможностям. Последние технологические достижения открыли новые возможности для создания человекоподобных роботизированных систем, например, за счет внедрения более совершенных датчиков и мягкой искусственной кожи.
Исследователи из лаборатории Bio-Inspired Robotics Кембриджского университета недавно создали новую кожу на основе гидрогеля, которая может позволить роботам искусственно воспроизводить человеческое чувство осязания. Эта высокорастяжимая кожа, представленная в статье, опубликованной в журнале Materials Today Electronics, воссоздает тактильные стимулы с помощью серии электродов и вычислительного подхода, не требующего моделирования.
«В последнее время исследователи всего мира интересуются тем, как можно изготовить роботов из гибких материалов, — говорит Дэвид Хардман, один из исследователей. — Такие мягкие роботы более безопасны в работе, не повреждают предметы, с которыми взаимодействуют, и могут выполнять задачи, которые очень сложны для традиционных роботов. Однако, чтобы получить все преимущества, все компоненты робота должны быть мягкими, включая все датчики».
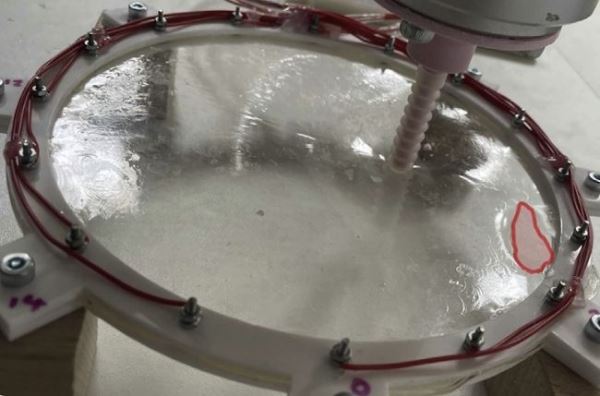
Черпая вдохновение в человеческой коже, Хардман и его коллеги задались целью создать растягивающийся сенсорный материал, который мог бы обнаруживать любые повреждения, чувствовать предметы или прикосновения человека. Созданная ими искусственная кожа основана на гидрогеле в сочетании с аппаратной системой на основе электродов.
«Мы используем специально разработанный гидрогель со встроенными датчиками в качестве основы нашей кожи, поскольку он является биоразлагаемым, настраиваемым и очень растяжимым, — объяснил Хардман. — Мы соединяем его с аппаратным обеспечением электроимпедансной томографии (ЭИТ), которое использует электроды на краю кожи для подачи тока и измерения напряжения, что дает нам информацию о состоянии кожи. Используя эти напряжения, мы пытаемся определить, где к коже прикасались или где она была повреждена».
Вместо того чтобы анализировать данные, собранные электродами, с помощью обычной архитектуры на основе нейронных сетей, как это делают большинство существующих искусственных кож, Хардман и его коллеги создали карты деформации для своей системы на основе гидрогеля, используя небольшое количество реальных данных.
«Сочетание технологий ЭИТ с функциональными сенсорами кожи приводит к возникновению ряда проблем, которые очень трудно решить с помощью чисто математических подходов, — говорит Хардман. — Мы представили способ значительно упростить эту задачу, включив в наши расчеты небольшое количество реальных данных. Благодаря этому мы можем приступить к решению задач, которые немыслимы при аналитическом подходе, добавив мягкие тактильные датчики по всей поверхности наших роботов».
На данный момент Хардман и его коллеги проверили потенциал своей кожи на основе гидрогеля для трех реальных приложений, а именно для обнаружения или локализации повреждений, мониторинга окружающей среды и распознавания различных тактильных стимулов. Их система хорошо справилась со всеми этими тремя задачами, что позволяет предположить, что ее можно использовать для расширения возможностей мягких роботизированных систем, предназначенных для решения различных задач.
«В настоящее время мы работаем над улучшением формы и размера кожи, чтобы ее можно было использовать для восприятия гораздо более сложных стимулов, — добавил Хардман. — Например, если бы кожа была наложена на роботизированную руку, мы бы хотели, чтобы она не только чувствовала место и силу прикосновения к коже, но и положение каждого пальца, а также то, была ли рука повреждена».
Источник: robogeek.ru






