Исследователи Georgia Tech разрабатывают многоногих роботов, способных преодолевать сложные ландшафты
Сороконожки, имея от десятков до сотен ног, могут преодолевать любую местность без остановки. Команда физиков, инженеров и математиков из Технологического института Джорджии заинтересовались, может ли множество конечностей быть полезным для локомоции роботов.
«Когда вы видите бегущую сороконожку, вы, по сути, видите животное, обитающее в мире, который сильно отличается от нашего, — говорит Дэниел Голдман, профессор семьи Данн в Школе физики. — В нашем движении в основном преобладает инерция. Но в мире многоножек, если они перестают шевелить своими частями тела и конечностями, они, по сути, мгновенно перестают двигаться».
Исследователи представили свою работу в статьях «Multilegged Matter Transport: A Framework for Locomotion on Noisy Landscapes» в журнале Science и «Self-Propulsion via Slipping: Frictional Swimming in Multilegged Locomotors» в Proceedings of the National Academy of Sciences.
Для написания статьи в журнале Science исследователи воспользовались математической теорией связи Клода Шеннона, которая показывает, как надежно передавать сигналы на расстояние, чтобы понять, почему многоногий робот так успешно передвигается. Теория предполагает, что один из способов обеспечить доставку сообщения из пункта А в пункт Б — это не посылать его в виде аналогового сигнала, а разбить его на дискретные цифровые единицы и повторить эти единицы с соответствующим кодом.
«Нас вдохновила эта теория, и мы попытались понять, может ли избыточность быть полезной при транспортировке, — говорит Бакси Чонг, исследователь в области физики. — Итак, мы начали этот проект, чтобы посмотреть, что произойдет, если у робота будет больше ног: 4, 6, 8 и даже 16».
Команда под руководством Чонга разработала теорию, согласно которой добавление пар ног к роботу увеличивает его способность устойчиво перемещаться по сложным поверхностям — эту концепцию они называют пространственной избыточностью. Такая избыточность позволяет ногам робота успешно действовать самостоятельно, не прибегая к помощи датчиков для интерпретации окружающей среды. Если одна нога отказывает, остальные поддерживают движение робота. По сути, он становится надежной системой для транспортировки себя и даже груза из пункта А в пункт Б по сложным ландшафтам.
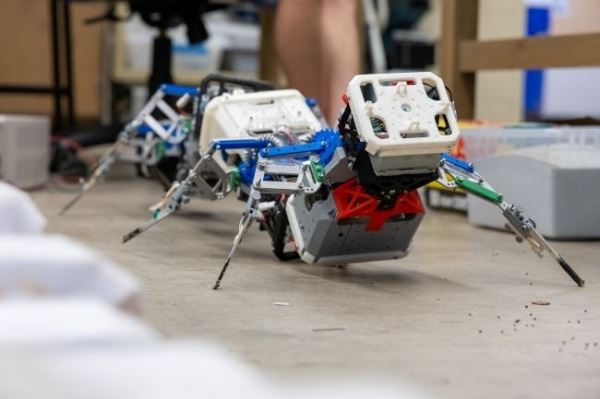
Чтобы проверить это, команда исследователей, создали несколько пространств, имитирующих непостоянную природную среду. Затем он протестировал робота, каждый раз увеличивая количество ног на две штуки, начиная с 6 и заканчивая 16. По мере увеличения количества ног робот мог более проворно перемещаться по местности, даже без датчиков, как и предсказывала теория. В конце концов, робот был испытан на открытом воздухе на реальной местности, где он смог передвигаться в различных условиях.
«Это действительно впечатляет — наблюдать, как многоногий робот умело ориентируется как в лабораторных условиях, так и на открытом воздухе, — сказал Джунтао Хэ, аспирант кафедры робототехники. — В то время как двуногие и четвероногие роботы в значительной степени полагаются на датчики для преодоления сложного рельефа, наш многоногий робот может выполнять подобные задачи с помощью управления в открытом контуре».
Исследователи уже применяют свои разработки в сельском хозяйстве. Голдман стал соучредителем компании, которая намерена использовать этих роботов для прополки сельскохозяйственных угодий.
«Они похожи на Roomba, только снаружи, — сказал Голдман. — Roomba работает, потому что у него есть колеса, которые хорошо работают на ровной поверхности. До разработки нашей системы мы не могли с уверенностью предсказать надежность опорно-двигательного аппарата на ухабистой, каменистой, заваленной мусором местности. Теперь у нас есть зачатки такой схемы, которая может быть использована для обеспечения того, чтобы наши роботы преодолевали поле с сельскохозяйственными культурами за определенное время».
Исследователи также хотят усовершенствовать робота. Они знают, почему каркас робота-сороконожки является функциональным, но теперь они определяют оптимальное количество ног для достижения движения таким образом, чтобы это было экономически эффективным, но при этом сохраняло преимущества.
Источник: robogeek.ru






