В ИТМО предложили универсальный метод проектирования адаптивных и энергоэффективных роботов
Ученые ИТМО разработали универсальный метод проектирования адаптивных и энергоэффективных роботов, которые способны перемещаться в незнакомом пространстве, безопасно взаимодействуя с окружением, объектами и людьми. Предложенный метод значительно упрощает создание робототехнических устройств. Технологию представят в Лондоне на самой масштабной в мире конференции по робототехнике ICRA 2023. В этому году команда ИТМО — единственные участники из России.

Иван Борисов, доцент факультета систем управления и робототехники ИТМО. Источник фото: Дмитрий Григорьев, ITMO.NEWS
Предложенный учеными метод — это универсальный фреймворк на основе алгоритмов. Он позволяет проектировать мобильных роботов (шагающих, прыгающих), большая часть требуемой динамики которых обеспечивается их физическим исполнением: распределением массы, эластичности, механических связей. Такие системы с «умной» механикой способны дольше работать без подзарядки, умеют адаптироваться к новым условиям и перемещаться по неровным поверхностям. Ученые уже применили метод для разработки захватного устройства, прыгающего и шагающего роботов, а также экзоскелета.
«Как только появились шагающие роботы, работающие не от розетки, а батареи, перед разработчиками встала задача повысить их энергоэффективность. Устройства, созданные по принципам индустриальной робототехники, могут внешне напоминать человека или животных. Их создают из тяжелых деталей и приводов, также они сильно зависят от технического зрения и сенсоров — из-за этого мобильные роботы потребляют слишком много энергии и не могут перемещаться по пересеченной местности. Наш метод основан на другом подходе: он позволяет конструировать, может, не такие точные и быстрые системы с высокой грузоподъемностью, но адаптивные и энергоэффективные, способные взаимодействовать со средой. Например, это адаптивные кисти, вслепую захватывающие объекты, или шагающие роботы, которые перемещаются в пространстве, даже если трехмерная карта окружения построена лишь частично или с ошибкой», – рассказывает Иван Борисов, доцент факультета систем управления и робототехники ИТМО.
Метод состоит из трех этапов. На первом — фреймворк решает задачу открытой кинематики: из скольких последовательных звеньев должен состоять механизм, какой они должны быть длины, какую траекторию с их помощью нужно выстроить, чтобы добиться желаемых поведения и производительности. На втором — к конструкции добавляются дополнительные звенья, они превращают ее в более сложную замкнутую кинематику. Закрытая кинематика позволяет получить механизм с меньшей инерцией и избавиться от лишних приводов. И, наконец, на третьем этапе фреймворк внедряет в полученную систему эластичные элементы и рассчитывает, куда поместить привод, который будет приводить робота в движение. Этот шаг позволяет сократить количество потребляемой энергии.
«Вводя минимальное количество параметров в фреймворк, инженер получает под свои задачи проект устройства. В нем рассчитаны все параметры, оптимизирована геометрия, грамотно распределены вес и эластичность. Все это помогает добиться конструкции, где двигатели и микроконтроллеры обеспечивают не весь процесс движения, а лишь корректируют поведение. Более того, нам удалось снизить требования к количеству, мощности и, соответственно, размерам приводов — самому дорогому и тяжелому элементу. Мы протестировали метод на разных механизмах, последний наш прототип прыгающего робота показал снижение мощности приводов в 4 раза в сравнении с классическими механизмами», – объясняет Кирилл Насонов, инженер факультета систем управления и робототехники ИТМО.
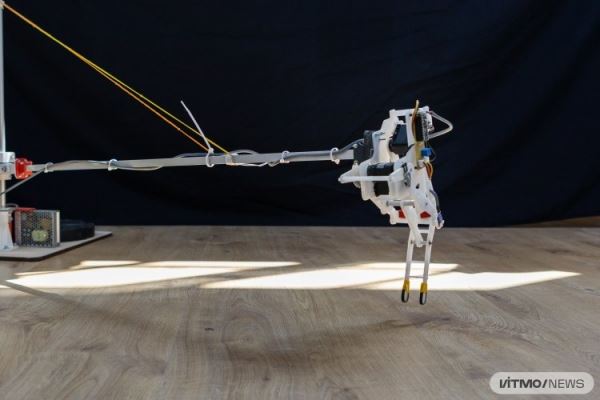
Источник фото: Дмитрий Григорьев, ITMO.NEWS
По словам авторов проекта, в ближайшем будущем метод будет доработан до программного продукта, который полностью автоматизирует процесс проектирования рычажных механизмов для мехатронных и робототехнических систем.
«На входе инженеру нужно будет задать минимальное количество характеристик, а на выходе алгоритма выбрать из десятка вариантов, ранжированных по эффективности, наиболее подходящий. Если вдруг ни один из них не подойдет, специалист сможет конкретизировать свой запрос, чтобы получить новую подборку: задать больше параметров или внести изменения в открытый код», – комментирует Дмитрий Иволга, инженер факультета систем управления и робототехники ИТМО.
Информация и фото предоставлены пресс-службой ИТМО
Источник: scientificrussia.ru