Японские исследователи представили многоногого робота Myriapod
Исследователи из Osaka University разработали робота, похожего на сороконожку, и показали, как его движения могут переключаться с прямолинейной на криволинейную ходьбу, что может помочь в поисково-спасательных операциях или исследовании других планет.
Большинство животных на Земле выработали надежную систему передвижения с помощью ног, которая обеспечивает им высокую степень мобильности в широком диапазоне сред. К некоторому разочарованию, инженеры, которые пытались повторить этот подход, часто обнаруживали, что такие роботы удивительно хрупки. Поломка даже одной ноги из-за повторяющихся нагрузок может серьезно ограничить способность этих роботов функционировать. Кроме того, управление большим количеством суставов, чтобы робот мог перемещаться по сложной среде, требует большой мощности компьютера. Усовершенствование этой конструкции было бы чрезвычайно полезно для создания автономных или полуавтономных роботов, которые могли бы действовать в качестве разведывательных или спасательных машин и проникать в опасные зоны.
В пресс-релизе университета заявлено, что Myriapod — это «новый вид шагающего робота, который использует преимущества динамической нестабильности для навигации». Изменяя гибкость муфт, можно заставить робота поворачивать без использования сложных вычислительных систем управления.
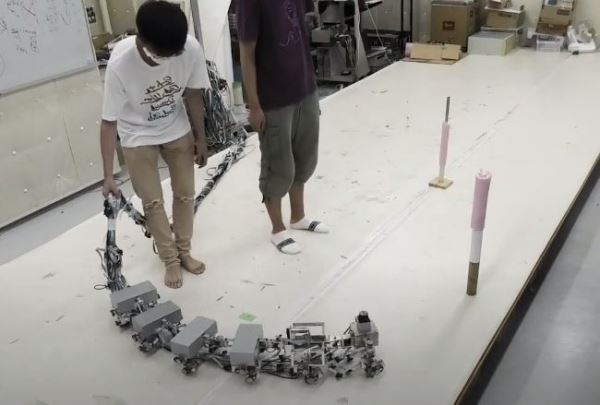
Их робот использует преимущества естественной нестабильности, способной преобразовывать прямолинейную ходьбу в изогнутое движение. В исследовании «Maneuverable and Efficient Locomotion of a Myriapod Robot with Variable Body-Axis Flexibility via Instability and Bifurcation», опубликованном недавно в журнале Soft Robotics, исследователи из Университета Осаки описывают своего робота, который состоит из шести сегментов и гибких суставов. С помощью регулируемого винта гибкость соединений может быть изменена с помощью двигателей во время ходьбы. Исследователи показали, что увеличение гибкости соединений привело к ситуации, называемой «бифуркация типа вилки», при которой прямолинейная ходьба становится неустойчивой. Вместо этого робот переходит к ходьбе по кривой, то вправо, то влево. Обычно инженеры стараются избегать возникновения нестабильности, однако их контролируемое использование может обеспечить эффективную маневренность.
«Нас вдохновила способность некоторых чрезвычайно проворных насекомых управлять динамической нестабильностью собственного движения для быстрого изменения движения, — говорит Шинья Аой, автор исследования. — Поскольку этот подход не управляет непосредственно движением оси тела, а скорее контролирует гибкость, он позволяет значительно снизить как вычислительную сложность, так и потребность в энергии».
Команда проверила способность робота достигать определенных мест и обнаружила, что он может ориентироваться, прокладывая кривые пути к целям. Будущие версии могут включать дополнительные сегменты и механизмы управления.
Источник: robogeek.ru






