Платформа с открытым исходным кодом моделирует дикую природу для разработчиков мягких роботов
С тех пор как в 2008 году был принят термин «мягкая робототехника», инженеры в этой области создали большое количество разнообразных гибких машин. Один из источников вдохновения для создания подобных роботов то, как двигаются животные в дикой природе.
Группа исследователей MIT разработали SoftZoo — платформу, вдохновленную биологическими факторами, которая позволяет инженерам совместно проектировать мягких роботов. Эта платформа оптимизирует алгоритмы и дизайн, она определяет, как будет выглядеть робот, и систему управления, которае обеспечивает движение роботов.
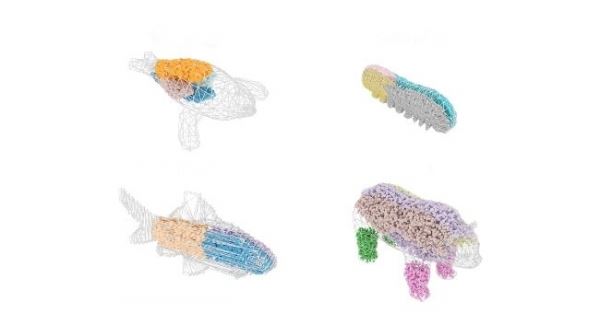
В платформе представлены трехмерные модели животных (панда, тюлень, акула, касатка, рыба, гусеница), которые могут имитировать задачи мягкой робототехники, такие как локомоция, маневренный поворот и следование по пути в различных средах. Будь то снег, пустыня, глина или вода, платформа демонстрирует компромиссы в производительности различных конструкций на разных участках местности.
«Наша структура может помочь пользователям найти наилучшую конфигурацию для формы робота, позволяя им разрабатывать алгоритмы мягкой робототехники, которые могут делать много разных вещей, — говорит аспирант MIT Цун-Хсуан Ванг, сотрудник Лаборатории компьютерных наук и искусственного интеллекта (CSAIL), который является ведущим исследователем проекта. — По сути, это помогает нам понять лучшие стратегии взаимодействия роботов с окружающей средой».
SoftZoo является более комплексной, чем аналогичные платформы, которые уже моделируют дизайн и управление, потому что она моделирует движение, реагирующее на физические особенности различных биомов. Универсальность платформы обеспечивается мультифизическим движком, который позволяет моделировать несколько аспектов физической системы одновременно, например, тюленя, поворачивающего на льду, или гусеницу, передвигающуюся по болотистой местности. Этот движок оптимизирует совместное проектирование, сокращая количество зачастую дорогостоящих симуляций, необходимых для решения задач вычислительного управления и проектирования.
Способность системы моделировать взаимодействие с различной местностью иллюстрирует важность морфологии — отрасли биологии, изучающей формы, размеры и формы различных организмов. В зависимости от окружающей среды, некоторые биологические структуры являются более оптимальными, чем другие, подобно сравнению чертежей машин, выполняющих схожие задачи.
Ранее роботы с трудом ориентировались в захламленной среде, поскольку их тела не соответствовали окружающей обстановке. В пресс-релизе MIT утверждается, что с помощью SoftZoo конструкторы могут разрабатывать мозг и тело робота одновременно, совместно оптимизируя наземные и водные машины, делая их более осознанными и специализированными. С более высоким поведенческим и морфологическим интеллектом роботы могли бы стать более полезными для выполнения спасательных миссий и проведения исследований. Например, если человек пропал во время наводнения, робот сможет более эффективно преодолевать водные просторы, поскольку он был оптимизирован с использованием методов, продемонстрированных на платформе SotftZoo.
«SoftZoo обеспечивает моделирование с открытым исходным кодом для разработчиков мягких роботов, помогая им создавать реальных роботов намного проще и гибче, ускоряя возможности машин по передвижению в различных средах», — добавляет соавтор исследования Чуань Ган, научный сотрудник лаборатории искусственного интеллекта MIT-IBM Watson.
Перед созданием любого типа робота система может стать заменой для полевых испытаний. Например, оценка поведения медведеподобного робота в пустыне может оказаться сложной задачей для исследовательской группы, работающей в центре Бостона. Вместо этого инженеры по мягкой робототехнике могли бы использовать трехмерные модели в SoftZoo для моделирования различных конструкций и оценки того, насколько эффективны алгоритмы управления их роботами, в плане навигации. В свою очередь, это позволило бы исследователям сэкономить время и ресурсы.
Тем не менее, ограничения существующих технологий изготовления стоят на пути воплощения этих мягких роботов в жизнь. «Переход от моделирования к физическому роботу остается нерешенным и требует дальнейшего изучения, — говорит Ванг. — Модели мышц, пространственно изменяемая жесткость и сенсоризация в SoftZoo не могут быть прямолинейно реализованы с помощью современных технологий изготовления, поэтому мы работаем над этими проблемами».
Результаты исследования команды будут представлены на днях на конференции ICLR 2023.
Источник: robogeek.ru






